В данном разделе рассматриваются деформационные манометры, в которых УЧЭ преобразует давление в перемещение его заданной точки (жесткий центр, наконечник трубчатой пружины и пр.). Затем указанное перемещение посредством передаточно-множительного механизма преобразуется в удобную для потребителя форму информации об измеряемом давлении, как правило, перемещение указателя относитель шкалы или пера самописца относительно диаграммы.
Наиболее распространенным манометром этого типа является деформационный манометр с одновитковой трубчатой пружиной (рис. 36). Измерительная система маномет-
Ю _,____________ ра содержит одновитковую
 ‘ трубчатую пружину 1, один
‘ трубчатую пружину 1, один
|
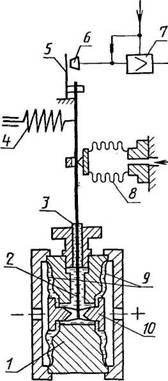
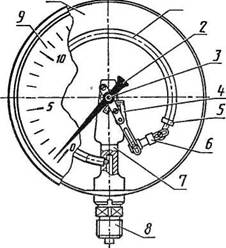
Рис. 36. Деформационный манометр с одновитковой трубчатой пружиной
|
конец которой герметично соединен с держателем 7, а на другой конец с наконечником 5 смонтирована тяга 6, которая шарнирно соединена с зубчатым сегментом 4. Перемещение наконечника трубчатой пружины преобразуется во вращение оси стрелочного указателя 2 с помощью насаженной на ось трубки 3 указателя, находящейся в зацеплении с зубчатым венцом сегмента 4. При возрастании давления, подаваемого внутрь трубчатой пружины, последняя разгибается, и стрелочный указатель поворачивается по часовой стрелке относительно шкалы 9, нанесенной на циферблат, закрепленный на корпусе 10 манометра. Для корректировки угла поворота указателя относительно шкалы длины плеч шарнирно-ры-чажного механизма, состоящего из тяги б и зубчатого сегмента 4, юстируются зажимными винтами. Штуцером 8 манометр присоединяется к источнику давления.
В зависимости от требуемой точности измерений и назначения степень сложности передаточного механизма и габаритные размеры манометра варьируются в широких пределах. Например, для обеспечения требуемой точности отсчета длина шкалы манометров типа МО классов 0,15-0,25 составляет не менее 500 мм
при диаметре корпуса 250 мм, в то время как у манометров классов 2,5—4 диаметр корпуса равен 40-60 мм. Для устранения люфта зубчатой передачи иа оси стрелки монтиру-
ются натяжные спиральные пружинки. В наиболее точных приборах предусмотрены меры по частичной компенсации влияния температуры. Существенно также различаются требования^ к качеству изготовления деталей и материалам УЧЭ.
Для удовлетворения потребностей народного хозяйства страны отечественная приборостроительная промышленность ежегодно выпускает около 10 млн. общепромышленных манометров с трубчатой пружиной классов точности 0,6; 1,0; 1,6; 2,5 и 4 с верхними пределами измерений от 0,1 до 100 МПа, а также десятки тысяч образцовых деформационных манометров и вакуумметров типов МО и ВО классов точности 0,15; 0,25 и 0,4 с верхними пределами измерений от —0,1 до +60 МПа.
Отличительная особенность манометров МО и вакуумметров ВО состоит в использовании „условной шкалы", отметки которой соответствуют не единицам давления („именованная шкала"), а условным единицам, причем одна условная единица равна цене деления шкалы. Шкала манометров МО классов 0,15 и 0,25 содержит 400 условных единиц, • класса 0,4 — 250 условных единиц (делений). Поэтому для каждого манометра при градуировке составляются таблицы, в которых на поверяемых отметках указано давление и соответствующее ему число условных единиц (отметок шкалы). Градуировка производится отдельно: при повышении и понижении давления. Показания на промежуточных отметках отсчитываются путем интерполяции. Манометры предназначены для измерений при температуре окружающей среды от 5 до 40°С. В результате измерений вводится температурная поправка hpt — 7я Р X X (20°С — г) или 8Р{ = тя (20°С — t), где7£
= (3-5)- 10"4 ^С"1 -температурный коэффициент модуля упругости материала трубчатой пружины.
Для манометров МО классов 0,15 и 0,25 с верхними пределами измерений от 0,1 до 2,5 МПа уЕ = 4 • 10~4 "С"1, от 4 до 60 МПа -уЕ
= 3 X X 10"4 "С"1, что при изменении температуры на 10° С соответственно составляет 0,4 и 0,3 %. Манометры снабжены корректором нулевого положения стрелки. Дополнительная погрешность после введения температурной поправки составляет ±0,256Pf (0,1 и 0,075 % соответственно).
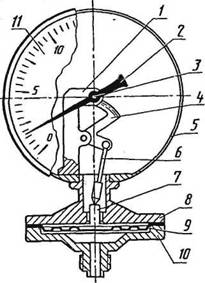
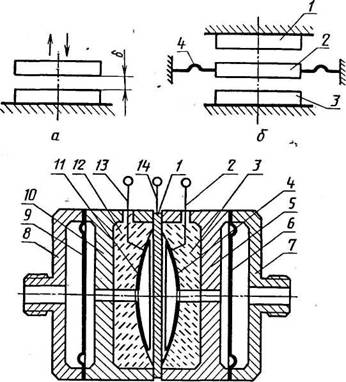
Широкое применение, особенно при измерении относительно небольших давлений (менее 1 МПа), находят также мембранные манометры. Одна из типичных конструкций деформационных манометров с мембранным УЧЭ представлена на рис. 37. Манометр содержит гофрированную мембрану 9, герметично закрепленную между фланцами 8 и 10, жесткий центр 7 которой шарнирно соединен с тягой 6. Перемещение мембраны под действием давления, подаваемого через штуцер фланца 10, шарнирно-рычажным механизмом и зубчатым сегментом 4 с трубкой, насаженной на ось 3, преобразуется в угловое вращение стрелки 2 относительно шкалы, нанесенной на циферблат 11, который смонтирован на корпусе 5 манометра. Передаточный механизм и стрелка монтируются на жестко связанную с корпусом стойку 1.
Отличительная особенность конструкции манометра — защита мембраны УЧЭ. от перегрузок давлением, благодаря ограничению перемеще-
ния мембраны плоской поверхностью фланца 8. Преимущество мембранных манометров — хорошая стабильность нулевого положения стрелки при изменениях температуры окружающей среды. Однако любая мембрана, в том числе и гофрированная, обладает приемлемой линейностью при относительно небольшом рабочем ходе, соизмеримым с толщиной мембраны. Поэтому в манометрах этого типа применяются передаточные механизмы с большим передаточным отношением, точность которых во многом определяет метрологические характеристики манометров.
|
37. Деформационный манометр с мембранным УЧЭ
|
Для измерения атмосферного и абсолютного давления воздуха в метеослужбе широко используются приборы с УЧЭ, в которых применяются мембранные коробки и блоки последовательно соединенных мембранных коробок
для увеличения рабочего хода УЧЭ. Например, в барометре типа М-98 в качестве УЧЭ применен блок, состоящий из двух последовательно соединенных коробок. Перемещение жесткого центра блока с помощью шар-нирно-рычажного механизма преобразуется во вращательное движение стрелки относительно шкалы. В отличие от передаточных механизмов с зубчатым зацеплением для вращения стрелки (см. рис. 36 и 37) в барометре М-98 стрелка вращается шарнирно-пластинчатыми цепочками и роликом, закрепленным на оси стрелки. Для снятия механического трения в шарнирах предусмотрен вибратор, питаемый от сети переменного тока.
Диапазон измерений барометра М-98 от 400 до 1080 гПа (300 -810 мм
рт.ст.), погрешность измерений не более ± 1,5 гПа (± 1 мм рт.ст.), что соответствует 0,15 % верхнего предела измерений. Шкала барометра именованная (мм рт.ст.), однако как и для манометров МО класса 0,15 необходима индивидуальная градуировка каждого барометра с целью определения шкаловых поправок. Барометр предназначен для эксплуатации при температурах окружающего воздуха от —20 до +50°С, при этом в его показания вводится температурная поправка ABt, зависящая как от температуры окружающей среды, так и от измеряемого давления В: ABtj=-k -t + у(75О — В) (t — 20°С), где t — температура окружающей среды. С: В — атмосферное давление, мм рт.ст.; к — температурный коэффициент. °С~1; 7 — коэффициент компенсации. сС-мм рт.ст.
зависимости от качества выполнения температурной компенсации *<±0,15ммрт.ст./°С (0,02%на1°С); т=(1-5)- 10~4 °С~1 — ммрт.ст.
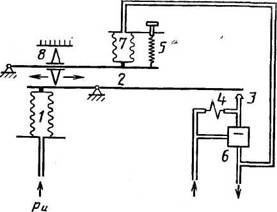
Один’из простейших путей совершенствования передаточных механизмов состоит в замене шарнирных соединений типа ось—втулка, обусловливающих механическое трение, а следовательно, и связанное с ним ухудшение вариации показаний и порога реагирования на упругие шарниры. К приборам этого типа относится деформационный манометр с мембранной коробкой типаFА-141 фирмы „Wallance &Tiernan" (ФРГ). Манометр содержит мембранную кОробку, тягу с противовесом, упругий шарнир, зубчатый сегмент, трубку, насаженную на ось стрелочного указателя, натяжную пружину с регулировочной головкой и штуцер, которые смонтированы на плате корпуса манометра. Манометр снабжен также дополнительным штуцером для подачи в герметичный корпус опорного давления, которое зависит от вида измеряемого давления (избыточное и абсолютное, разность давлений).
Разность давления внутри мембранной коробки, подаваемого через штуцер, и в корпусе вызывает линейное перемещение жесткого центра мембранной коробки, которое тягой и зубчатым сегментом, находящимся в "2цеплении с трубкой, преобразуется в угловое перемещение стрелочного указателя относительно шкалы манометра. Передаточный механизм, за исключением опоры вращения оси стрелки, содержит упругие направляющие, что дает минимальные потери на трение. Натяжная пружина, обеспечивая постоянный контакт между сопрягающимися элементами передаточного механизма, позволяет с помощью регулировочной головки производить точную установку стрелки на нулевую отметку шкалы.
Манометром измеряют абсолютное давление (кбрпус манометра при этом откачивается), избыточное давление (корпус сообщается с атмосферным давлением) и разность давлений, большее из которых подается внутрь мембранной коробки, а меньшее — в корпус манометра. При измерении разрежения (отрицательного избыточного давления), наоборот, атмосферное давление подается внутрь мембранной коробки, а разрежение — в корпус манометра. Во всех случаях избыточное давление в корпусе манометра не должно’превышать 0,1—1 МПа (в зависимости от модификации манометра она указывается на циферблате). Корпус манометра снабжен защитным клапаном, который автоматически отключает корпус от источника давления при достижении предельно допустимой величины.
Наибольшая точность достигнута манометрами серии 1500 (погрешность измерений не более 0,066 % верхнего предела измерений). Это в два раза лучше, .чем точность отечественных образцовых манометров типа МО класса 0,15. Следует, однако,.отметить, что обеспечивая по принципу действия измерения в диапазоне малых давлений (до 0—15 гПа), мембранные манометры при давлениях свыше 2—5 МПа становятся менее чувствительными, чем манометры типа МО с трубчатой пружиной.
Использование корпуса манометра для подвода на УЧЭ меньшего давления для измерения разности давлений, как это сделано в маномет-
pax типа FA-141, ограничено небольшими статическими давлениями (менее 1 МПа), так как при увеличении статического давления резко возрастают требования к прочности корпуса и смотрового стекла. Иногда для измерения разности давлений применяют два УЧЭ, в каждый из которых подается свое давление pi и р2.
В дифференциальном манометре типа 001 фирмы „Wika" (ФРГ) в качестве УЧЭ применены две трубчатых пружины, одна из которых сообщает вращение стрелке относительно основной шкалы, вторая — вращение дополнительной шкалы относительно основной. Это позволяет одновременно измерять рх и р2, а также их разность Др — pi — р2. Однако указанным способом нельзя достигнуть высокой точности измерений, особенно при больших статических давлениях (pi ир2). Погрешность манометра типа 001 при измерении р\ и р2 составляет 2,5 % верхнего предела измерений, а погрешность измерения разности резко возрастает по мере ее уменьшения по сравнению с pi и р2. Указанное относится ко всем приборам с механическими преобразователями перемещения УЧЭ во вращательное движение стрелки при измерении разности давлений при высоких статических давлениях.
* Контрольный вопрос № 6
Влияет ли вид’измеряемого давления — абсолютное и избыточное, разность давлений — на принципиальную схему и конструкцию деформационного манометра?
Если „да" — см. с. 92, если „нет" — см. с. 96.
В последние десятилетия все большее распространение стали находить методы преобразования перемещения УЧЭ, основанные на измерении электрических величин, и, прежде всего, электромагнитные и электростатические преобразователи, а также реостатные преобразователи и ДР-
В технике измерения давления находят применение индуктивные и трансформаторные (взаимоиндуктивные) электромагнитные преобразователи.
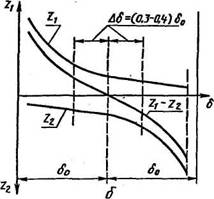
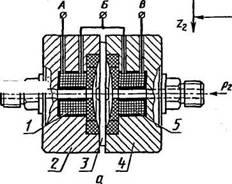
Индуктивными преобразователями называются преобразователи, преобразующие перемещение в изменение индуктивности магнитной цепи. Принцип действия преобразователя заключается в следующем (рис. 38). Преобразователь содержит (рис. 38, а) магнитопроводы 7 и 2 с катушками Zi и Z2, между которыми помещен жесткий центр 3 мембраны. Катушки питаются напряжением переменного тока и включены в индуктивный мост, два дополнительных плеча которого составляют постоянные сопротивления Z3 и Z4. В равновесном положении мост сбалансирован и сила тока /к в диагонали моста равна нулю. При воздействии на мембрану давления жесткий центр сместится, что приведет к увеличению магнитного сопротивления магнитопровода 1 и уменьшению сопротивления магнитопровода 2, а вместе с тем и их полных электрических сопротивлений Zt и Z2
■ В результате разбаланса моста по диагонали последнего потечет ток /к, пропорциональный перемещению центра мембраны, а следовательно, давлению.
Рис. 38. Принцип действия индуктивного преобразователя
|
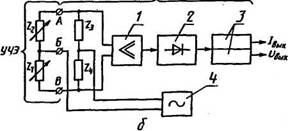
Рис. 39. Схема дифференкиального датчика разности давлений фирмы „Hartman & Braun"
|
Демодулятор
Электрическое сопротивление каждой из катушек связано с перемещением б гиперболической зависимостью (рис. 38, б), которая имеет ярко выраженный-нелинейный характер: Zx =/i (б) и Z2 =/2 (б), причем комплексное сопротивление катушек изменяется противофазно. Дифференциальная схема индуктивного преобразователя, выходным параметром которой является разность Z\ — Z2, расширяет линейный участок до Дб = ± (0,3—0,4) б0, а также существенно повышает чувствительность ez = AZ/Z преобразователя, которая позволяет фиксировать 0,1 мкм по перемещению жесткого центра.
По принципу действия индуктивные преобразователи пригодны для измерения любого вида давления: абсолютного, избыточного и разности давлений. При этом достоинством индуктивных преобразователей является отсутствие механических устройств для вывода выходного сигнала УЧЭ к промежуточным преобразователям, что обусловливает отсутствие потерь на трение в передаточном механизме. Поэтому индуктивные преобразователи пригодны для измерения небольших разностей давлений при высоком статическом давлении с хорошими динамическими характеристиками.
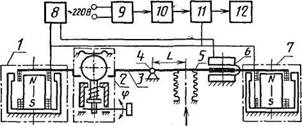
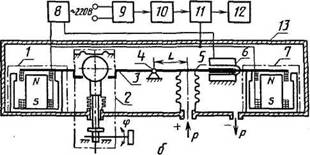
На рис. 39, а представлена конструктивная схема дифференциального датчика разности давлений фирмы „Hartman & Braun" (ФРГ). Датчик содержит включенные противофазно катушки индуктивности 1 и 5, между которыми фланцами 2 и 4 закреплена мембрана 3. Мембрана и фланцы образуют две измерительные камеры, в которые подаются измеряемые давления pt и р2. Под действием разности давлений р\ -р2 мембрана прогибается, изменяя при этом магнитное сопротивление, а следовательно, индуктивности катушек, образующих полумост. При помощи выводов А, Б и В датчик подключается к постоянным сопротивлениям Z3 и Z4
демодулятора (рис. 39, б), образуя полный мост, индуктивность которого в диапазоне измерений разности давлений измеряется от 5 до 100 мГн. Измерительная система питается от генератора 4 переменным током частотой 3 кГц. Выходной сигнал моста усиливается фазочувстви-тельным усилителем 1 и преобразуется выпрямителем 2 в выходной токовый сигнал /вых (±3 мА), поступающий на светопечатающее регистрирующее устройство и аналоговое напряжение £/вых (0—5 В), которое подается на показывающий вторичный прибор или устройство магнитной записи. Фильтры 3 очищают выходные сигналы от искажений, внесенных при промежуточных преобразованиях.
Фирма выпускает датчики типа EOSE150 для измерения избыточного давления, типа EOSE153 — для измерения абсолютного давления,типа EOSE165 и EOSE70 — для измерения избыточного давления и разности давлений. Технические характеристики датчиков приведены в табл. 10.
К контрольному вопросу № 6
Вы ответили правильно. Если при этом Вы особо подчеркнули, что при измерении избыточного давления в манометре достаточно предусмотреть одну измерительную камеру, а при измерении абсолютного давления и разности давлений — две измерительные камеры, то смело можете переходить к изучению последующего материала.
Таблица 10
|
|
Числовое значение характеристики датчика типа EOSE
|
|
Техническая характеристика
|
|
|
|
|
|
|
150, 1150*
|
153
|
165, 1165*
|
70
|
|
Верхние пределы измере-
|
От 0,005
|
От 0,035
|
От 21
|
От 0,014
|
|
ний, МПа
|
до 14
|
до 3,5
|
до 42
|
до 2,8
|
|
Максимальное статичес-
|
21
|
От 0,07
|
55
|
7
|
|
кое давление, МПа
|
|
ДО 7
|
|
|
|
Линейность, %
|
±0,2
|
±0,25
|
±0,5
|
±0,5
|
|
Гистерезис и воспроизво-
|
±0,2
|
±0,2
|
, ±0,5
|
±0,5
|
|
димость, %
|
|
|
|
|
|
Диапазон рабочих темпе-
|
От-40
|
От-40
|
От-40
|
От-40
|
|
ратур, С
|
До+80
|
до+80
|
до+80
|
до+80
|
|
|
от-60
|
|
от-60
|
|
|
|
до +200*
|
|
до +200*
|
|
|
Влияние температуры на:
|
|
|
|
|
|
стабильность нуля,
|
0,02
|
0,04
|
0,02
|
0,04
|
|
чувствительность,
|
•0,02
|
0,02
|
: 0,02 .
|
0,02
|
|
Габаритные размеры, мм
|
38X51X68
|
38X51X71
|
51X65X78
|
21X29X52
|
|
Масса, кг
|
0,14
|
0,17
|
0,50
|
0,08
|
|
|
0,37*
|
|
0,78*
|
|
* Корпус и детали датчика изготовлены из нержавеющей легированной стали для работы на агрессивных средах.
Дальнейшая миниатюризация индуктивных датчиков в принципе ограничена размерами катушек. Помимо этого, расположение катушек непосредственно в измерительных камерах приводит к усилению влияния температуры. Несомненными достоинствами индуктивных датчиков являются: простота конструкции, хорошие динамические характеристики, высокие выходные сигналы, долговременная стабильность.
Простейший электростатический преобразователь (рис. 40, а) содержит два электрода в форме плоских пластин, расположенных параллельно относительно друг друга, которые образуют конденсатор. Если одна из пластин имеет возможность перемещаться, то электрическая емкость С преобразователя обратно пропорциональна расстоянию между пласти-
нами
С= е’s
(4.10)
где 5 — площадь пластины; б — диэлектрическая проницаемость среды, находящейся между пластинами;^ 5 — расстояние между пластинами.
Согласно (4.10) мерой перемещения является электрическая емкость, поэтому преобразователи этого типа называются емкостными.
При подключении к преобразователю источника переменного тока
через него потечет ток силой
/ = со • С — Um ■itcos ot, (4.11)
В
Рис. 40. Электростатический преобразователь
где Um — напряжение переменного тока; w — круговая частота.
Так же, как и в индуктивных преобразователях, зависимость между емкостью и перемещением имеет нелинейный характер (гипербола). Для уменьшения нелинейности при измерении малых перемещений (от 1 мкм до 1 мм), как правило, применяются дифференциальные емкостные преобразователи (рис. 40, б). Обкладка 2 закреплена на мембране 4, перемещение которой требуется измерить, обкладки / и 3 неподвижны. При перемещении обкладки 2 емкость между обкладками 1 и 2 увеличивается, а между обкладками 2 и 3 уменьшается, или наоборот (в зависимости от направления перемещения).
Дифференциальные емкостные преобразователи отличаются высокой чувствительностью (до 500 В/мм), малыми погрешностями и простотой конструкции, особенно при измерении разности давлений. Зависимость электрического сопротивления преобразователя от перемещения мембраны практически линейна.
ьг-Ъ-Ъ- JTs ‘ <4Л2>
где Дб — перемещение мембраны; Zx и Z? — электрические сопротивления конденсаторов, образованных неподвижными обкладками и мембраной.
Включением в схему емкостного моста осуществляется дальнейшее преобразование перемещения мембраны в требуемые выходные сигналы.
Данный принцип измерений использован в мембранно-емкостном преобразователе давлений типа ПДД-1-10А, серийно выпускаемом в нашей стране, который комплектуется показывающим вторичным прибором типа ВД-1 с цифровым отсчетом. Одна из измерительных камер преобразователя откачена до достаточного давления менее 10~3 Па (10~s
мм рт.ст.), в другую подается измеряемое абсолютное давление. Расстояние между неподвижными обкладками и мембраной составляет 0,1 мм. Цифровое табло- вторичного прибора позволяет отсчитывать результаты измерений в двух диапазонах: 1,3—173 Па (0,01—1,3 мм рт.ст.) и 173 Па — 1,33 кПа (1,3—10 мм рт.ст.). Погрешность измерений составляет 5—10 % в зависимости от диапазона, что для области вакуумных измерений обеспечивает высокую точность.
При измерении давления различных сред, в том числе и агрессивных, их попадание в измерительные камеры приводит к неопределенности диэлектрической проницаемости между обкладками преобразователя, что резко снижает точность измерений. В этих случаях емкостный преобразователь изолируется от измеряемой среды разделительными мембранами. Типичным примером реализации данного принципа является емкостный преобразователь типа 1151ДР фирмы „Rosemount Inc", США (рис. 40, в). Он содержит измерительную мембрану 1, герметично закрепленную между втулками 5 и 10, в которые запрессованы керамические твердые подложки 3 и 12. На внутренние поверхности подложек нанесены тонкопленочные электроды 4 и 11. Измерительные камеры изолированы от среды, давление которой измеряется, разделительными мембранами 6 и 9, имеющими относительно небольшую жесткость и защищенными крышками 7 и 8. Пространство между разделительными и измерительной мембранами заполнено силиконовым маслом, что обеспечивает постоянство диэлектрической проницаемости и предохраняет измерительную мембрану от перегрузок давлением. Мембрана и электроды включаются в мостовую схему с помощью экранированных проводов 2,13 и 14, выходной сигнал которой путем демоделирования и дальнейших преобразований поступает на показывающие или регистрирующие приборы, а также в системы регулирования и управления в форме унифицированного токового сигнала 4—20 мА.
Преобразователи имеют диапазоны измерений разности давлений от 0-1,25 кПа (0—125 мм вод.ст.) до 0-200 кПа (0-2 кгс/см2) при статическом давлении до 14 МПа (140 кгс/см2). Совместное влияние нелинейности, гистерезиса и повторяемости приводит к погрешности не более ±0,2 %, долговременная стабильность показаний ±0,2 % за 6 мес.
К достоинствам емкостных преобразователей можно отнести высокую точность и чувствительность, простоту конструкции, возможность применения при высоких температурах (до 350° С) и малую инерционность. Однако для обеспечения высокой точности требуются применение генераторов высокой частоты, защита от помех (специальные экранированные кабели, размещение электроники вблизи от преобразователя и пр.). Следует отменить, что зти меры существенно удорожат аппаратуру, необходимую для применения емкостных преобразователей, по сравнению с другими методами.
К контрольному вопросу № 6
Вы ошиблись. Еше раз внимательно просмотрите разд. 2.4, а также разд. 1.1.
Реостатные преобразователи основаны на изменении активного электрического сопротивления при перемещении заданной точки УЧЭ, которое преобразуется в угловое или линейное перемещение токосъемника по контактной дорожке сопротивления. Недостатком преобразователей этого типа является связанное со взаимным перемещением механическое трение, что существенно ограничивает их точность. Помимо этого, для достижения приемлемой чувствительности требуется относительно большое перемещение УЧЭ, что приводит к существенной нелинейности. Поэтому реостатные преобразователи неприменимы для точных измерений давления.
Большие возможности для точного преобразования перемещения УЧЭ предоставляют оптические методы, а также применение фото-электрических следящих систем, которые осуществляют преобразование с высокой разрешающей способностью, полностью исключая механическое трение в передаточном механизме. Однако манометры этого типа весьма сложны по технологии изготовления и градуировке. Так, фирмой Texas Instr (США) выпускается манометр с УЧЭ, предоставляющим многовит-ковую винтовую трубчатую пружину, изготовленную из кварца. На оси УЧЭ с помощью проволочной растяжки закреплено зеркальце, поворот которого при изменении давления отслеживается фото-электрической следящей системой. При этом совмещение последней с положением зеркальца осуществляется электродвигателем, число оборотов вала которого одновременно передается на механический цифровой счетчик, являющийся указателем давления. Высокая разрешающая способность следящей системы позволяет свести погрешность до 0,015 % верхнего предела измерений. При этом, несмотря на использование кварца в качестве материала УЧЭ, необходимо термостатирование последнего. Манометры этого типа предназначены для точных измерений в лабораториях, а также для поверочных работ. Сложность и громоздкость конструкции в сочетании с высокой стоимостью препятствуют их широкому применению.

 Рёых
Рёых